Home > Usage
Acquiring InsectBot and Client Source Code
On this page you will find calls referring to "ib_client/*", which
are InsectBot client programs. All this source code is from the
InsectBot package located in SVN on robot.anu.edu.au. To acquire the
latest package simply do:
svn co svn+ssh://<username>@robot.anu.edu.au/home/repos/insectbot
WebSVN: Their is a web-based viewer for the insectbot svn
repository which can be found here.
NOTE: If you do not have a user account on robot.anu.edu.au,
contact Luke Cole or
Shaun Press.
Download:
insectbot-9.05.01.tgz
Controlling InsectBot
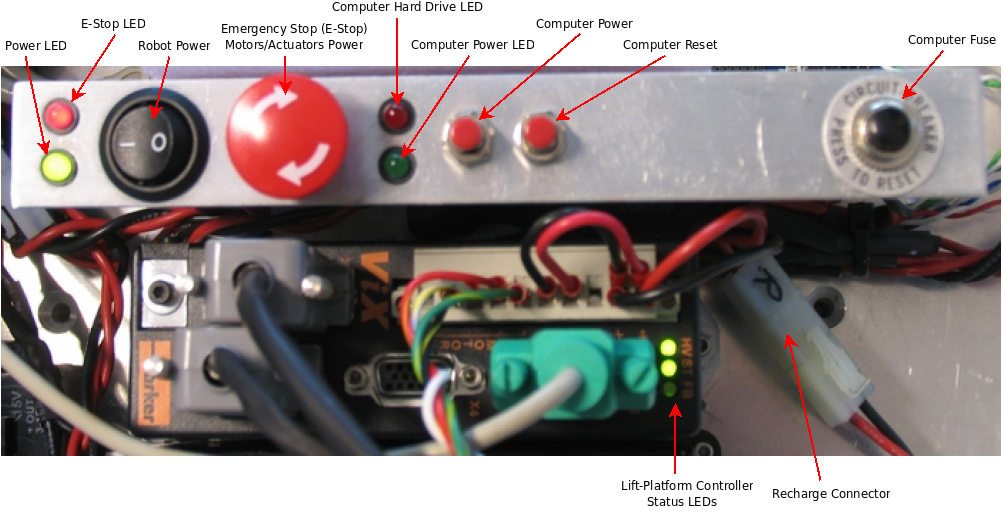
- Turn on the robot power, via pressing the "Robot Power" button,
which will illuminate the "Power LED".
- (Optional) To automatically have the robot home the
lift-platform during bootup, ensure "E-Stop" is disabled, which will
illuminate the "E-Stop LED". Now wait for the lift-platform
controller to be ready, which is indicated by the lift-platform
controller status LEDs both going green for HV and ST.
NOTE:
If "E-Stop" is enabled before bootup, you will need to manually home
the lift-platform to control it. After computer bootup simply run
the run the following on a computer:
ib_client/ib_utils -H <INSECTBOT_IP> -L
- Bootup the InsectBot computer, via pressing "Computer Power"
button, which will illuminate the "Computer Power LED". You will hear 1 beep after you press the "Computer
Power" button and will hear 4 beeps when the robot is ready to be
used.
NOTE0: The InsectBot NIC will attempt to get a IP from a DHCP
server. Within NICTA, this will be a static IP 203.143.173.251
NOTE1: When the insectbot boots up it will automatically run
the following (which calls "ib/init.sh 30"):
/etc/init.d/bootup-insectbot start
- Now you can run your InsectBot clients. Or simply use one of
the provided programs:
ib_client/js_ctrl
ib_client/ib_utils
Connecting your Laptop directly to InsectBot
- Plug a cross-over cable from the InsectBot computer NIC
to your laptop NIC.
- On your laptop, ensure you have a DHCP installed and set a
static IP (generally 10.0.0.200) for the InsectBot MAC
address (ie. 00:40:63:e2:f2:c2). To install a DHCP server:
sudo apt-get install dhcp3-server
- Now start the DHCP server via the following script:
sudo ib_client/init_network_laptop.sh
OR do it yourself, via:
sudo ifconfig eth0 10.0.0.1
sudo /etc/init.d/dhcp3-server restart
- Now turn on the InsectBot and bootup its computer (see above).
- When finished, you can disable the DHCP server by the script:
sudo ib_client/init_network_laptop-disable.sh
OR do it yourself, via:
sudo /etc/init.d/dhcp3-server stop
sudo ifdown eth0
sudo ifup eth0
Programming InsectBot Clients
Simply include the following files in your code:
- lib/ib_api.c
- lib/ib_api.h
Then you must first call the routine:
int ib_init_client(char *insectbot_ip, int ip_port_drive, int ip_port_lp, int ip_port_vision);
And then you can call any of the following routines:
int ib_drive_send(int *motor_speeds, int *motor_dirs, int motor_nums);
int ib_drive_send_exit();
int ib_lp_send(double vel, double accel, double deaccel, int pos);
int ib_lp_send_home();
int ib_lp_send_exit();
int ib_vision_recv(IplImage **imgs, int *imgs_count);
Please refer to the source code for descriptions of routines and
arguments, or simply view the
documentation generated via doxygen of
ib_api.c and
ib_api.h.
Example InsectBot clients:
- ib_client/ib_utils.c - a basic program
to use the InsectBot features.
- ib_client/js_ctrl.c - a program to
control the drive and lift-platform via a side-winder joystick.
Charging the InsectBot Batteries
- Ensure power supply is not connected to a load
(i.e. InsectBot).
- Set power supply voltage to 27V and set power supply current to
very small.
- Connect power supply to InsectBot recharge connector (labelled "R").
- You will notice the voltage on the power supply drop, now
increase the current to the desired current. (i.e. for continuous charge:
use 0.36A if InsectBot is powered down and 2.5A if InsectBot
powered up).
Troubleshooting
Motor(s) not behaving correctly?
Ensure you send positive motor speeds between 0 and
IB_MOTOR_MAX_CL_SPEED.
Wheel/Motor not moving?
If you find a wheel/motor is not moving, then it could be one of the
following problems:
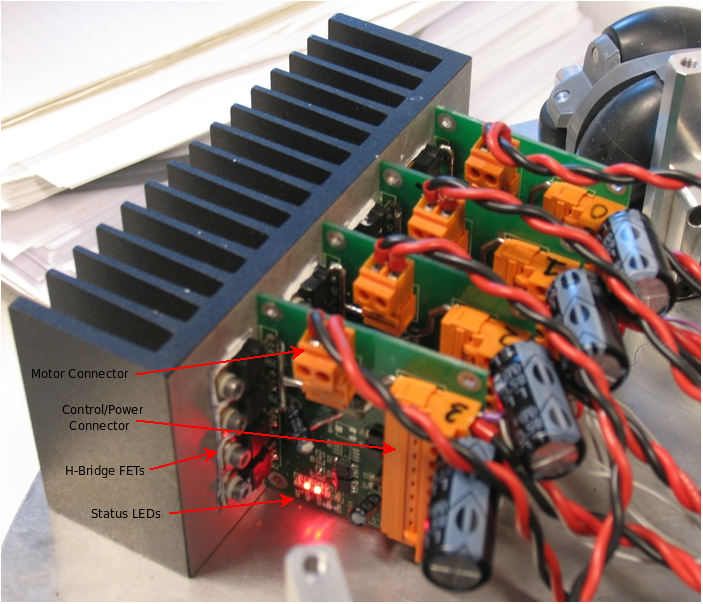
- (Most likely) A blown motor controller fuse. To fix, simply
replace the blown fuse to the effected motor
controller. NOTE: The fuse holders and motor controllers are
clearly labelled 0 to 3.
- Blown H-Bridge FETs. To fix, replace all four FETs on the
effected motor controller. NOTE: this should only happen if your
playing around with controlling the motors directly (i.e. without using
usb_iob_motor_ctrl.c) and have a bug in your software.
If this happened for any other reason contact
Luke Cole asap.
- (Unlikely) The axle between the motor and the wheel is slipping. To fix,
you must reglue (using masterbond) the motor axle to the wheel.
NOTE: Problem (1) or (2) will be indicated via an uilluminated motor
controller status LED "VCCM".
Lift-Platform not moving?
If you find the lift-platform is not moving, then most likely the
lift-platform controller is not ready or in an error state (indicated
via non-green status LEDs, HV and ST). To fix, toggle "E-Stop" then
restart the lift-platform server on InsectBot
(/home/insectbot/insectbot/ib/vix250ie_lp_server), or simply restart
InsectBot.
No four beeps after bootup?
If you find the startup script is not doing the four beeps,
then it could be one of the following problems:
- The InsectBot computer did not bootup correctly (i.e. no inital
single beep). To fix, turn power completly off, wait a few seconds
and then try and bootup again.
- The Linux OS is checking the hard drive. To fix, keep waiting
or just reboot.
- The Linux OS is broken. To fix, reinstall OS.
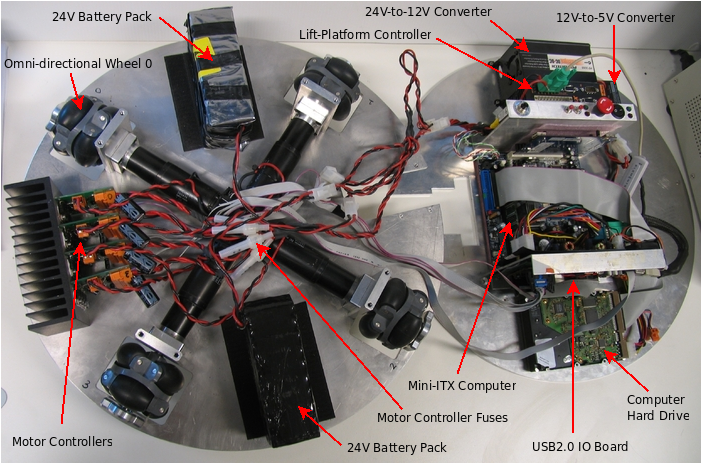
Inside the InsectBot
NOTE: Wheels/motors are labelled clockwise with 0 starting
at 1:30 o'clock when lift-platform mechanism (opposite end to motor
controllers) is closest to observer.
Primary buttons and LEDs for the InsectBot:
Motor controller LEDs and Fuses: